Digitaalinen kooderi on laite, joka tunnistaa mekaanisen liikkeen ja muuntaa sen elektronisiksi pulsseiksi tai digitaalisiksi koodeiksi.
Digitaalinen kooderi on laite, joka tunnistaa mekaanisen liikkeen ja muuntaa sen elektronisiksi pulsseiksi tai digitaalisiksi koodeiksi. Et ehkä näe miltä se todella näyttää, mutta olet varmasti havainnut laitteita ja laitteita, joihin on asennettu tällaiset mekanismit. Hyvä esimerkki on ehkä dial-tyyppinen radioviritin, jossa on digitaalinen näyttö. Digitaalisia koodereita on kahta tyyppiä, absoluuttianturi ja inkrementtianturi. Tässä kuitenkin keskustellaan siitä, miten mitataan vain jälkimmäisen signaalit. Koska se käyttää vain kahta anturia, tämän tyyppinen digitaalinen kooderi on halvempi kuin absoluuttinen. Siksi sitä löytyy myös yleisemmin elektroniikkamarkkinoilta.
Koska se käyttää vain kahta anturia, tämän tyyppinen digitaalinen kooderi on halvempi kuin absoluuttinen.
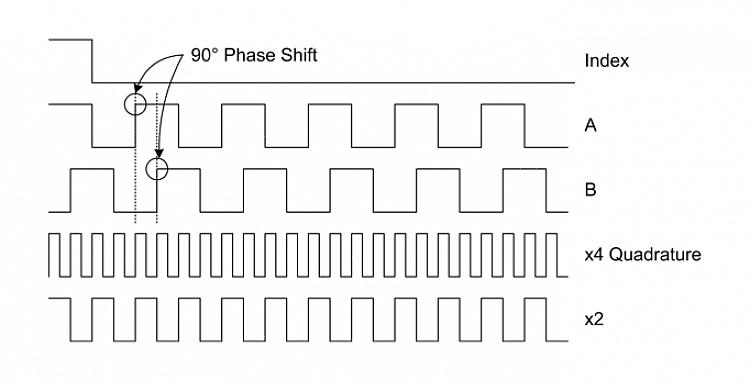
Akselianturina tämä laite mahdollistaa minkä tahansa asennonsiirron rekisteröinnin ja muuntamisen digitaalisiksi pulsseiksi. Kun akseli kääntyy, pulssijunat luodaan kahteen anturikanavaan. Kahden signaalin vaiheen suhde esittää akselin pyörimissuunnan. Siksi, jos sinun on mitattava suhteellisen kooderin signaalit, miten sitä kutsutaan myös, sinun on ehkä noudatettava vain pyörimissuuntaa ja nopeutta. Seuraavassa on tapoja, joilla tarkka mittaus voidaan tehdä.
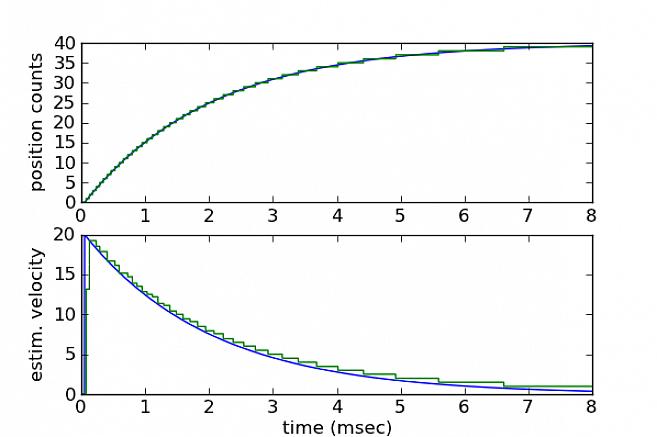
Sen sijaan, että luotettaisiin vain yhteen akselin tai mekaanisen liikkeen väliin, näyte mahdollisimman monta kertaa. Kun kädessä on enemmän näytteitä, sinun pitäisi pystyä selvittämään sen tuottamien signaalien keskimääräinen mittaus ottamalla huomioon pulssien määrä jokaisella aikavälillä.
Voit saada mittauksen myös mittaamalla pulssiintervallien välisen aikaeron. Tämä edellyttää kuitenkin ensin ulkoisen laitteiston asentamista. Tätä käytetään keskeytysten tuottamiseen normaalissa kooderiprosessissa. Kun tämä on kytketty, voit sitten alkaa mitata aikaeroja.
Pyörivien koodereiden testauslaitteita on saatavana monissa elektronisissa kaupoissa. Voit ostaa yhden näistä ja käyttää sitä mittaamaan kooderisi tuottamat signaalit. Tämä on paljon yksinkertaisempaa tehdä, koska kaikki mitä sinun tarvitsee tehdä, on yhdistää se kooderin päätelaitteisiin. Siinä on oma LCD-näyttö, jolla voit tarkastella mittaustuloksia.
Toinen menetelmä sen signaalin mittaamiseksi on ottaa huomioon sijainti. Sijaintikooderina sen sijainnin muutokset tallennetaan ja muunnetaan signaalien eri taajuuksiksi. Tämä saattaa kuitenkin tarvita toisen ulkoisen laitteiston tarkkojen lukemien tarjoamiseksi.
Inkrementtianturi tuottaa
Kaikkien näiden ehdotettujen vaiheiden joukossa pidetään jatkuvasti pulssin / kierrosta lukemista. PPR: llä on vastaava signaalin voimakkuus ja taajuus. Siksi tätä harkitsemalla voit laskea inkrementtianturin tuottamat signaalit. Jos se on jonkin muun alatyypin, kuten lineaarisen kooderin, alla, voidaan käyttää samoja periaatteita ja prosesseja paitsi sitä osaa, jossa sijainnista tehdään mittauksen perusta.